

Autonomous Space Robotics Lab
Devon Island
Rover Navigation Dataset
Rover traverse data
Overview

Stereo imagery, sun vectors, and inclinometer data were collected over a ten-kilometer traverse starting and ending at the Haughton-Mars Research Station on Devon Island. The data collection platform was a pushcart outfitted with typical rover engineering sensors---a Point Grey Research Bumblebee XB3 stereo camera, a Honeywell HMR-3000 inclinometer, and a Sinclair Interplanetary SS-411 digital sun sensor. For ground-truth position, a pair of Magellan ProMark3 GPS units were used to produce post-processed differential GPS data for the whole traverse. The data is partitioned into 23 sections. At the start of each section, a batch of sun vectors and inclinometer readings, together with global position from GPS, were used to estimate the rotation between the sun sensor frame and the topocentric frame. This estimate provides platform orientation at the start of each subsequence, allowing motion estimates to be easily compared to ground-truth data provided by the GPS.
Route
The rover platform travels ten kilometers over this traverse, starting at 10:00am near the Haughton-Mars Project Research Station and returning in a large loop to the start by 6:00pm. The traverse passes through many areas exhibiting the unique, vegetation-free, planetary-analogue terrain that Devon Island is known for---rocky canyons, boulder fields, sandy flats, and significant topographic relief. When collecting the data, every effort was made to ensure that a minimum of man-made objects were in view of the camera. The resulting images, coupled with data from the other sensors and excellent ground-truth position information, make a truly unique dataset relevant both to the mobile robotics and planetary exploration researchers.
[View Devon Island Rover Navigation in Google Maps or download the kmz file to view in Google Earth]Data Collection Details


The platform shown on the above was used to collect the rover traverse data. Frames associated with the platform are shown on the bottom figure.
Frame transformations
There are six frames of interest in this dataset:
| Frame | x-axis | y-axis | z-axis |
| (t) Topocentric | East | North | up |
| (c) Left camera | aligned with horizontal pixels | aligned with vertical pixels | optical axis |
| (r) Right camera | aligned with horizontal pixels | aligned with vertical pixels | optical axis |
| (s) Sun sensor | toward connector | optical axis | |
| (z) Inclinometer | away from connector | up | |
| (g) RTK GPS | - | - | - |
To represent rotations, we will use an axis-angle representation Given a unit vector axis, a, and an angle, r, the rotation matrix, C, may be built using

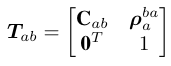
 to mean the vector from the origin of coordinate frame 'a' to the origin of coordinate frame 'b' (denoted by the superscript), expressed in coordinate frame 'a' (denoted by the subscript). Using this notation, we may build a 4x4 transformation matrix, Tab, that takes points from coordinate frame 'b' to coordinate frame 'a' as
to mean the vector from the origin of coordinate frame 'a' to the origin of coordinate frame 'b' (denoted by the superscript), expressed in coordinate frame 'a' (denoted by the subscript). Using this notation, we may build a 4x4 transformation matrix, Tab, that takes points from coordinate frame 'b' to coordinate frame 'a' as

| Transformation | x [m] | y [m] | z [m] | a1 | a2 | a3 | r [rad] |
| Tsz | 0.18 | -0.09 | 0.00 | -0.013 | -0.005 | -0.999 | 1.56 |
| Tsc | 0.21 | -0.17 | -0.09 | -0.015 | -0.790 | 0.612 | -3.11 |
| Tcr | 0.24 | 0.00 | 0.00 | 1.000 | 0.000 | 0.000 | 0.00 |

|
0.20 | -0.12 | -0.03 | - | - | - | - |
Timestamp format
Timestamps in the log files are stored in ISO 8601 format. The first image of the stereo sequence has the following timestamp:
2008-07-12T09:59:41.812500-05:00
---- -- -- -- -- --------- -----
| | | | | | |
Year -- | | | | | |
Month ------- | | | | |
Day ---------- | | | |
Hour ------------- | | |
Minute ---------------- | |
Seconds------------------- |
Time-zone offset--------------------
The time-zone offset, -05:00, is the offset for Central Daylight Time (CDT) on the date that the dataset was recorded. To recover Coordinated Universal Time (UTC), 5 hours must be added to the timestamp. Matlab scripts for parsing ISO time strings are available here.
Images
The full sequence contains 49410 images. The full-color, full-resolution sequence is over 338.1 gigabytes of data. To ease the use of the dataset, we have taken two steps to make this more manageable. First, we have split the full sequence into 23 subsequences. An estimate of the platform's orientation in the topocentric frame is available for the first image of each of these subsequences, allowing easy comparison of motion estimate results to ground truth. Second, we have included three versions of the dataset so that only the specific version needed must be downloaded. The versions are:- Unrectified, color images at 1280x960 resolution
- Rectified, color images at 1280x960 resolution
- Rectified, greyscale images at 512x384 resolution.
| Camera calibration, Rectified, 1280x960 | |
| Baseline: | 0.239977002 |
| Focal Length: | 968.999694824 |
| ImageCenter (row, col): | 463.537109375 635.139038086 |
| Resolution (rows, cols): | 960 1280 |
| Camera calibration, Rectified, 512x384 | |
| Baseline: | 0.239977002 |
| Focal Length: | 387.599884033 |
| ImageCenter (row, col): | 185.114852905 253.755615234 |
| Resolution (rows, cols): | 384 512 |
We have provided the rectification lookup tables in the file RectificationLUTs.zip. Each camera has two files lut-{left,right}-x.txt and lut-{left,right}-y.txt. These are space-seperated ASCII files containing the two-dimensional x and y lookup tables for rectification (Lx and Ly) such that:

This is the format needed by the OpenCV remap function. In Matlab, the rectification look up tables may be loaded using the script readRectificationLuts.m and an image may be rectified using the script rectifyImage.m. See the Tools section for more details.
Log file formats
This section lists the log files and describes their formats. For convenience, matlab scripts are provided to parse all log files. See the Tools section for more details. The log files have been bundled into a single zip file: rover-traverse-logs.zip [2.9 MB]image-times.txt
A text file mapping the image sequence number to the time the image was taken. The columns of this file are as follows:| image index | timestamp |
known-orientations.txt
At 23 points along the traverse, the platform was stopped to gather a bundle of sun sensor and inclinometer measurements. These were used to estimate the orientation of the platform with respect to the topocentric frame (t) (x: east, y: north, z: up). The file 'known-orientations.txt' contains the results for these 23 locations. The file contains the image index, along with the parameters of the rotation Ctc using the axis-angle convention described above. The columns of this file are:| image index | atc1 | atc2 | atc3 | rtc [rad] |
The entry atcn is the nth component of the unit-length axis atc, and rtc is the rotation around this axis in radians.
inclinometer.txt
A text file containing inclinometer readings. The inclinometer was logging at 1Hz but the logging was paused at many points throughout the day. The columns in this file are as follows:| timestamp | pitch [deg] | roll [deg] |
To transform the pitch/roll readings into a unit gravity vector (pointing down), g, in the inclinometer frame, let p = pitch and r = roll:
inclinometer-sampled.txt
A text file containing inclinometer readings that have been associated with images. The columns in this file are as follows:| image index | pitch [deg] | roll [deg] | time offset [s] |
The time offset is the amount of time between the inclinometer reading and the image capture time.
sun-sensor.txt
A text file containing sun sensor readings. The columns of this file are as follows:| timestamp | azimuth angle [deg] | zenith angle [deg] |
To transform the sun sensor readings into a unit vector, s, pointing to the sun in the sun sensor frame, let a = azimuth angle and b = zenith angle:
sun-sensor-sampled.txt
A text file containing sun sensor readings that have been associated with images. The columns in this file are as follows:| image index | azimuth angle [deg] | zenith angle [deg] | time offset [s] |
The time offset is the amount of time between the sun sensor reading and the image capture time.
gps-latlngele.txt
A text file containing the latitude, longitude, and elevation of the platform, all expressed with respect to the WGS84 ellipsoid. The columns of this file are:| timestamp | latitude [deg] | longitude [deg] | elevation [m] |
gps-latlngele-sampled.txt
A text file containing the latitude, longitude, and elevation of the platform, all expressed with respect to the WGS84 ellipsoid, and sampled at the image times. The columns of this file are:| image index | latitude [deg] | longitude [deg] | elevation [m] |
gps-utm.txt
A text file containing the UTM Easting, Northing, and elevation of the platform. The UTM zone is 16X and the elevation is expressed with respect to the WGS84 ellipsoid. The columns of this file are:| timestamp | latitude [deg] | longitude [deg] | elevation [m] |
gps-topocentric.txt
A text file containing the metric displacement of the camera in the topocentric frame (x points East, y points North, and z points up) relative to the initial position (i.e., the position of the first image is [0,0,0]) and sampled at the image times. The columns of this file are as follows:| image index | easting [m] | northing [m] | elevation [m] |
Access Tools
The following tools are provided for the convenience of dataset users.
Matlab Scripts
- axisAngle2Dcm.m - Convert an axis and rotation angle into a rotation matrix.
- dcm2AxisAngle.m - Convert a rotation matrix into an axis and rotation angle.
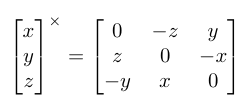
- crossMx.m - The skew-symmetric matrix that may be used to implement the cross product.
- deg2rad.m - Converts degrees to radians.
- rad2deg.m - Converts radians to degrees.
- datenumToIsoTimeString.m - Converts a matlab datenum into an ISO time string.
- getIsoTimeStringRegexp.m - Provides a regular expression that may be used to match an ISO time string
- isoTimeStringToDatenum.m - Converts an ISO time string into a matlab datenum
- readGpsLatLngEle.m - Reads the GPS latitude/longitude/elevation file.
- readGpsLatLngEleSampled.m - Reads the sampled GPS latitude/longitude/elevation file.
- readGpsUTM.m - Reads the GPS latitude/longitude/elevation file.
- readGpsTopocentric.m - Reads the GPS topocentric file.
- readImageTimes.m - Reads the image times file.
- readInclinometer.m - Reads the raw inclinometer data file.
- readInclinometerSampled.m - Reads the sampled inclinometer data file.
- readKnownOrientations.m - Reads the file of known orientations.
- readSunSensor.m - Reads the sun sensor raw data file.
- readSunSensorSampled.m - Reads the sampled sun sensor data file
- plotMotionEstimateVsGps.m - Plots a motion estimate against GPS.
- readRectificationLuts.m - Read the rectification look up tables.
- rectifyImage.m - Rectify an image using the rectification look up tables.
- getInterSensorTransformation.m - Build the 4x4 inter-sensor transformation between any pair of sensors.
Downloads
Links to download all files are provided below. Alternately, log in to the ftp site and use and ftp client to download files in batch.Important note: The dataset provides ftp download links. Some browsers no longer enable ftp links by default and you need to change the settings if you want to download using the browser. Using the wget command is an alternative to avoid the browser.
Log files
The log files have been bundled into a single zip file: rover-traverse-logs.zip [2.9 MB]Images
Download links for each of the three versions of the images are provided below. We have also prepared videos of each subsequence for easy preview of the images.










| High-resolution video previews | |||
| Subsequence | Start image | End image | Download link |
| 0 | 1 | 2087 | sequence-00.mpg [167 MB] |
| 1 | 2088 | 4488 | sequence-01.mpg [192 MB] |
| 2 | 4489 | 7451 | sequence-02.mpg [237 MB] |
| 3 | 7452 | 10207 | sequence-03.mpg [220 MB] |
| 4 | 10208 | 12265 | sequence-04.mpg [165 MB] |
| 5 | 12266 | 14996 | sequence-05.mpg [215 MB] |
| 6 | 14997 | 17625 | sequence-06.mpg [206 MB] |
| 7 | 17626 | 19789 | sequence-07.mpg [173 MB] |
| 8 | 19790 | 21508 | sequence-08.mpg [138 MB] |
| 9 | 21509 | 23802 | sequence-09.mpg [182 MB] |
| 10 | 23803 | 26633 | sequence-10.mpg [226 MB] |
| 11 | 26634 | 28568 | sequence-11.mpg [154 MB] |
| 12 | 28569 | 31334 | sequence-12.mpg [221 MB] |
| 13 | 31335 | 33806 | sequence-13.mpg [198 MB] |
| 14 | 33807 | 36016 | sequence-14.mpg [177 MB] |
| 15 | 36017 | 38795 | sequence-15.mpg [222 MB] |
| 16 | 38796 | 41317 | sequence-16.mpg [202 MB] |
| 17 | 41318 | 43418 | sequence-17.mpg [168 MB] |
| 18 | 43419 | 45112 | sequence-18.mpg [135 MB] |
| 19 | 45113 | 46680 | sequence-19.mpg [125 MB] |
| 20 | 46681 | 48123 | sequence-20.mpg [108 MB] |
| 21 | 48124 | 48977 | sequence-21.mpg [59 MB] |
| 22 | 48978 | 49410 | sequence-22.mpg [32 MB] |
| Unrectified, color images at 1280x960 resolution | |||
| Subsequence | Start image | End image | Download link |
| 0 | 1 | 2087 | color-raw-1280x960-s00.zip [14.3 GB] |
| 1 | 2088 | 4488 | color-raw-1280x960-s01.zip [16.4 GB] |
| 2 | 4489 | 7451 | color-raw-1280x960-s02.zip [20.3 GB] |
| 3 | 7452 | 10207 | color-raw-1280x960-s03.zip [18.9 GB] |
| 4 | 10208 | 12265 | color-raw-1280x960-s04.zip [14.1 GB] |
| 5 | 12266 | 14996 | color-raw-1280x960-s05.zip [18.7 GB] |
| 6 | 14997 | 17625 | color-raw-1280x960-s06.zip [18.0 GB] |
| 7 | 17626 | 19789 | color-raw-1280x960-s07.zip [14.8 GB] |
| 8 | 19790 | 21508 | color-raw-1280x960-s08.zip [11.8 GB] |
| 9 | 21509 | 23802 | color-raw-1280x960-s09.zip [15.7 GB] |
| 10 | 23803 | 26633 | color-raw-1280x960-s10.zip [19.4 GB] |
| 11 | 26634 | 28568 | color-raw-1280x960-s11.zip [13.2 GB] |
| 12 | 28569 | 31334 | color-raw-1280x960-s12.zip [18.9 GB] |
| 13 | 31335 | 33806 | color-raw-1280x960-s13.zip [16.9 GB] |
| 14 | 33807 | 36016 | color-raw-1280x960-s14.zip [15.1 GB] |
| 15 | 36017 | 38795 | color-raw-1280x960-s15.zip [19.0 GB] |
| 16 | 38796 | 41317 | color-raw-1280x960-s16.zip [17.3 GB] |
| 17 | 41318 | 43418 | color-raw-1280x960-s17.zip [14.4 GB] |
| 18 | 43419 | 45112 | color-raw-1280x960-s18.zip [11.6 GB] |
| 19 | 45113 | 46680 | color-raw-1280x960-s19.zip [10.7 GB] |
| 20 | 46681 | 48123 | color-raw-1280x960-s20.zip [9.9 GB] |
| 21 | 48124 | 48977 | color-raw-1280x960-s21.zip [5.8 GB] |
| 22 | 48978 | 49410 | color-raw-1280x960-s22.zip [2.9 GB] |
[Back] [Top] [Overview] [Route] [Details] [Tools] [Downloads]