

Autonomous Space Robotics Lab
Goran Basic
M.A.Sc in Aerospace Engineering (University of Toronto)
M.A.Sc in Space Studies (International Space University, Strasbourg, France)
B.A.Sc in Information Science and Linguistics (University of Zagreb, Zagreb, Croatia)

Contact Info
Institute for Aerospace Studies
University of Toronto
4925 Dufferin Street, Room 150B
Toronto, ON
M3H 5T6
Canada
goran.basic [at] robotics.utias.utoronto.ca
+1 416-667-7730 (voice)
+1 416-667-7799 (fax)
Research
In-situ planetary exploration has been quite reliant on mobile robotic platforms, which tend to deliver very limited science return. Mostly, this is because rovers can't cover large areas due to their very limited speed. Wind-blown, spherical Tumbleweed rovers can reach higher speeds due to their unique spherical shape and size.
In the majority of space missions, solar cells are most commonly used and are the most reliable way to generate power on a spacecraft. Because of the Tumbleweed's spherical characteristics, solar cells would be quite useless if integrated inside the shell and prone to destruction if integrated outside the shell, which is in constant contact with the ground.
In comparison to conventional rovers, ball-shaped rovers can't efficiently use solar cells for power generation, which made them infeasible in space applications. My research is focused on developing a novel power generation method for spherical-shaped rovers, which use its motion energy to generate electrical power.
The concept proposed in this work provides a robust and reliable solution for generating power on a Tumbleweed rover. The proposed solution is only dependent on the wind for its propulsion and power generation and is not affected by any other unfavourable meteorological phenomena.
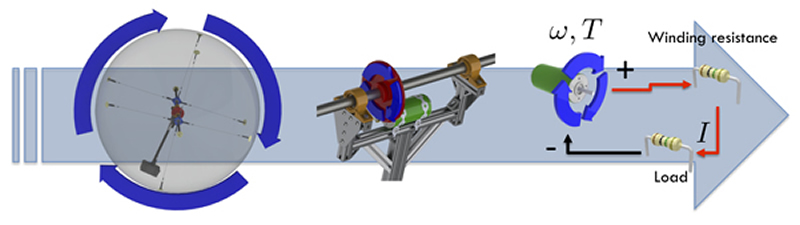
The proposed solution, depicted above uses a pendulum inside an inflatable spherical shell to generate power. Similar to a windmill, when a ball is being pushed by the wind, the pendulum rotates around the main axle and acts on the generator through a geared mechanism. This creates electrical power that is measured through the sensors located in the payload box. The details of the design will be covered in more detail in
later sections.
My thesis describes the development of the parametric analytical model and the design and testing of the developed prototype at UTIAS Autonomous Space Robotics Lab.
Publications
Technical Reports
Behar, A., Matthews, J., Venkateswaran, K., Bruckner, J., Basic, G., So, E., Rivadeneyra, C. - ”A deep sea Hydrothermal Vent Bio-sampler for large volume in-situ filtration of hydrothermal vent fluids”, NASA Tech Briefs, May 2005 (pdf)
| Last Updated: October, 2010. |